Misją Instytutu jest dzialalność naukowo-badawcza prowadząca do nowych rozwiązań technicznych i organizacyjnych użytecznych w kształtowaniu warunków pracy zgodnych z zasadami bezpieczeństwa pracy i ergonomii oraz ustalanie podstaw naukowych do właściwego ukierunkowywania polityki społeczno-ekonomicznej państwa w tym zakresie.



3 Niektóre cechy wózków ułatwiające zachowanie bezpieczeństwa podczas użytkowania
3.1 Zalecenia ogólne
Zaleca się, aby w przedsiębiorstwie były opracowane zarówno polityka jak i procedura dotyczące zakupu wózków. Jest to bowiem zakup urządzenia stwarzającego poważne zagrożenia. Zaleca się zbieranie opinii także operatorów, pracownika bhp, pracowników nadzoru, ekspertów spoza firmy.
Zaleca się uwzględnienie warunków, w jakich wózek będzie użytkowany.
Zaleca się uwzględnienie oczywiście właściwości użytkowych wózka, np. ładowność, wysokość podnoszenia itd. Zaleca się także uwzględnienie właściwości ergonomicznych, ułatwiających obsługę wózka.
Zaleca się także uwzględnienie właściwości ułatwiających zachowanie bezpieczeństwa podczas użytkowania wózka. Należy dobrze poznać oferowane właściwości, aby upewnić się, czy w jakichś warunkach proponowane właściwości nie stwarzają nieoczekiwanie dodatkowych zagrożeń. Nabywca powinien domagać się od dostawcy wyczerpujących informacji, aby nie popełnić błędu.
3.2 Pasy bezpieczeństwa
Każdy wózek powinien być wyposażony w pasy bezpieczeństwa. Jeśli wózek nie jest wyposażony w pasy bezpieczeństwa przez producenta, to użytkownik powinien to uczynić przed dopuszczeniem wózka do użytkowania. Prawidłowo wykonane przymocowanie pasów bezpieczeństwa nie stanowi wprowadzenia zmian w konstrukcji wózka. Doświadczenie dowodzi, że jeśli wózek się przewraca, to pasy bezpieczeństwa umożliwiają kierowcy przeżycie.
3.3 Sygnalizacja ostrzegawcza
Zaleca się, aby wózki były wyposażone w sygnalizację ostrzegawczą dźwiękową i świetlną działającą również podczas cofania.
3.4 Wskaźnik prędkości jazdy wózka
Zaleca się, aby każdy wózek był wyposażony we wskaźnik prędkości jazdy.
Nie ulega bowiem wątpliwości, że w transporcie wewnątrzzakładowym z wykorzystaniem podnośnikowych wózków jezdniowych mogą występować różne warunki jazdy, zaś w niektórych warunkach konieczna jest znajomość przez kierowcę maksymalnej wartości prędkości jazdy i przestrzeganie tej wartości. To prawda, że kierowca wózka poruszającego się po drodze wewnątrzzakładowej, tak samo jak kierowca samochodu na drodze publicznej, nie może cały czas patrzeć na wskaźnik prędkości jazdy, ale w miejscach ważnych dla zachowania określonej prędkości (na przykład zbliżając się do łuku drogi, przejścia dla pieszych czy skrzyżowania z inną drogą) powinien mieć możliwość sprawdzenia prędkości jazdy i dostosowania jej do wymagań wynikających z konieczności zachowania bezpieczeństwa. Dane dotyczące wypadków zarówno w kraju jak i zagranicą dowodzą, że nie jest możliwym zmniejszenie ryzyka wypadkowego do wartości akceptowalnej, jeśli nie są określone dopuszczalne wartości prędkości jazdy na drodze i nie są one przestrzegane. A więc wyposażenie wózka we wskaźnik prędkości jazdy jest bardzo ważną cechą wózka, ułatwiającą zachowanie bezpieczeństwa. Wielu producentów wózków już to zrozumiało i wyposaża swoje wyroby we wskaźnik prędkości jazdy.
W tych przypadkach, gdy wózek nie jest wyposażony we wskaźnik prędkości jazdy, zaleca się, aby użytkownik zainstalował w wózku wskaźnik prędkości jazdy, produkowany przez producenta mierników prędkości jazdy wózka. Mierniki prędkości jazdy przeznaczone do stosowania w wózkach podnośnikowych produkuje np. firma KEYTROLLER LLC[6]z USA. W p. 3.4.1 podano informacje na temat mierników prędkości produkowanych przez tę firmę.
3.4.1 Mierniki prędkości jazdy wózka produkowane przez firmę KEYTROLLER LLC[7]
Firma KEYTROLLER LLC produkuje całą gammę przyrządów, np. KEYTROLLER 601, SPEEDTROLLER i inne. Niektóre z nich, jak np. KEYTROLLER 601, nie tylko wskazują prędkość, ale i pełnią inne bardzo ważne funkcje w aspekcie bezpieczeństwa użytkowania wózka. Funkcje te są realizowane w ten sposób, że przyrządy wskazujące, będące jednostkami głównymi, są wyposażone (lub mogą być wyposażone opcjonalnie) w wiele elementów, będących same w sobie dość skomplikowanymi przyrządami, umożliwiającymi także monitorowanie wózka. Można powiedzieć, że jest to system monitorowania wózka ze wskaźnikiem prędkości, będącym w systemie jednostką główną.
3.4.1.1 System monitorowania wózka z jednostką główną KEYTROLLER 601
System ten jest przeznaczony głównie dla firm mających dużą flotę wózków i bezprzewodową sieć WiFi. W przypadku braku sieci WiFi, firma oferuje rozwiązanie zastępcze w postaci systemu umożliwiającego stworzenie strefowego systemu sieci WiFi.
System KEYTROLLER 601 ma następujące właściwości, wybrane z całego ich szeregu:
- Umożliwia rozruch i zatrzymanie systemu i silnika wózka z klawiatury jednostki głównej – nie są potrzebne kluczyki, natomiast kierowca powinien wprowadzić, korzystając z klawiatury jednostki głównej swój kod dostępu, albo posłużyć się identyfikacyjną kartą dostępu RFID przesuwaną nad klawiaturą jednostki głównej (patrz rys. 3.1).
- Umożliwia kierowcy, przed rozpoczęciem zmiany, wypełnić, w sposób elektroniczny, wykaz wykonanych przez niego sprawdzeń wózka.
- Przypomina i ostrzega na wyświetlaczu jednostki głównej o terminie planowej konserwacji wózka.
- Ostrzega kierowcę wózka o przekroczeniu ustalonej wartości maksymalnej prędkości; zlekceważenie ostrzeżenia przez kierowcę powoduje włączenie się alarmu dźwiękowego i zarejestrowanie zdarzenia w rejestrze.
- W przypadku wystąpienia niektórych zdarzeń jak np. silniejsze uderzenie wózkiem w element infrastruktury, następuje wyłączenie silnika napędowego wózka.
- System rejestruje dane umożliwiające ocenę wydajności pracy kierowcy i wykorzystania czasu pracy wózka.
- System umożliwia otrzymywanie przez kierowcę wózka informacji wysyłanych do niego z serwera sieci bezprzewodowej.
Bezprzewodowy system z jednostką główną 601 może być stosowany w wielu wózkach z silnikami spalinowymi i elektrycznymi.
Według producenta, system może być dostarczany do pomiaru prędkości w km/h oraz z istotnymi informacjami na wyświetlaczu w języku polskim.

Rys. 3.1 Wygląd jednostki głównej miernika prędkości systemu 601
Jednostka główna jest wyposażona w wodoszczelną klawiaturę i kolorowy wyświetlacz LCD. Na wyświetlaczu podczas uruchamiania wózka standardowo można odczytać, między innymi:
- datę;
- dzień tygodnia;
- czas;
- zarejestrowaną wartość maksymalną temperatury;
- imię i nazwisko operatora;
- liczbę godzin pracy wózka;
- liczbę godzin czasu, jaki pozostał do przeglądu wózka;
- datę przeglądu wózka.
Podczas normalnej pracy zamiast liczb godzin standardowo na wyświetlaczu można odczytać aktualną prędkość jazdy wózka oraz maksymalną prędkość jazdy wózka (patrz rysunek 3.1).
Każdy kierowca ma swój kod dostępu lub kartę identyfikacyjną dostępu. Rozwiązanie takie umożliwia uruchomienie wózka tylko upoważnionym i przeszkolonym kierowcom.
Na rysunku 3.2 przedstawiono budowę modułową jednostki głównej miernika prędkości systemu 601.

Rys. 3.2. Ilustracja budowy modułowej jednostki 601
Na rysunku 3.3 przedstawiono różne możliwości zainstalowania czujnika prędkości, będącego składnikiem systemu, w wózku. Producent przewiduje także możliwość wykorzystania w systemie czujnika prędkości, który jest już zamontowany w nim np. przez producenta tego wózka.

Rys. 3.3 Ilustracja możliwości montażu czujnika prędkości w wózku
3.4.2. SYSTEM SPEEDTROLLER
System ten jest przeznaczony dla małych i średnich firm.
System ten:
- mierzy i wskazuje prędkość jazdy wózka (w milach na godź. lub w km/h);
- po przekroczeniu ustalonej prędkości, po upływie „czasu łaski”, system wysyła sygnał świetlny i dźwiękowy (syrena - 120 dB).
Na rysunku 3.4 przedstawiono wskaźnik prędkości w tym systemie.

Rys. 3.4. Wskaźnik prędkości jazdy w systemie SPEEDTROLLER
Z powyższych informacji wynika, że nie ma dużych przeszkód, aby właściciel wózka nie zapewnił warunków umożliwiających zmniejszenia ryzyka wypadkowego, związanego z prędkością jazdy wózka, do poziomu akceptowalnego.
3.5 System samoczynnego zmniejszania prędkości wózka podczas jazdy po łuku
Zaleca się, aby wózek miał system samoczynnego zmniejszania prędkości podczas jazdy po torze zakrzywionym. Przykładem takiego systemu jest system stosowany w trójkołowych wózkach TRAIGO 24 z systemem SAS. SAS jest skrótem od angielskiego „System of Active Stability”, czyli System Aktywnej Stateczności. Według informacji producenta, jest to opatentowany system, który składa się z 10 czujników, 3 siłowników oraz kontrolera nieustannie kontrolującego wszystkie operacje wózka i automatycznie wprowadzającego korekty w jego działaniach zapobiegając niestabilności wózka oraz ładunku. W wózkach 3-kołowych, jeżeli system SAS wykryje, że prędkość jazdy na zakręcie jest za duża, wówczas następuje automatyczne zmniejszenie prędkości wózka w celu zachowania stateczności. Przeprowadzono pomiary działania tego systemu w budynku magazynowym firmy Toyota Material Handling Polska w Jaktorowie, ul. Potockiego 1A. Na rysunku 3.5 zamieszczono widok wózka TRAIGO 24 z systemem SAS podczas testów. W testach w Jaktorowie tory jazdy wózka były zbliżone do łuków o promieniach 3 m, 4 m i 5 m, zaś prędkość jazdy wynosiła od około 11 km/h do około 6 km/h. Prędkość jazdy mierzono i rejestrowano rejestratorem prędkości CIOP-PIB.

Rys. 3.5. Widok wózka Toyota Traigo 24 z systemem SAS podczas pokonywania zakrętu pod kątem 90
Na rysunku 3.6 przedstawiono wykres zarejestrowanych prędkości podczas jednego z trzech przejazdów po łuku o promieniu około 3 m z prędkością początkową wynoszącą 11,25 km/h.
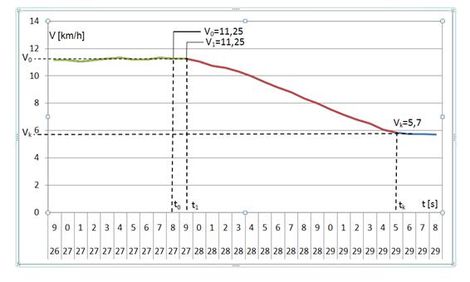
Rys. 3.6. Wykres zarejestrowanych prędkości wózka TRAIGO 24 z systemem SAS podczas jazdy po łuku promieniu około 3 m
Jak widać z wykresu, samoczynne zmniejszanie prędkości nastąpiło, ale nie od razu, lecz po krótkiej zwłoce. Prędkość wózka zmniejszyła się z 11,25 km/h do 5,7 km/h, a więc do około połowy wartości prędkości początkowej, po około 1,5 s od początku zmniejszania się prędkości. Na rysunku 3.7 przedstawiono zmiany te w ujęciu kątowym dotyczącym zakrętu pod kątem 90º.
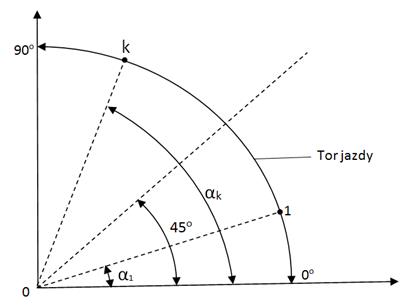
Rys. 3.7. Ilustracja położenia punktów początku (1) i końca (k) samoczynnego zmniejszania prędkości jazdy wózka TRAIGO 24 z systemem SAS na zakręcie pod kątem prostym
System zastosowany w wózku TRAIGO 24 zmniejsza prędkość jazdy w zależności od kąta skręcenia tylnego koła. Kąt α1 oznacza kąt, po przebyciu którego wózek zaczął zmniejszać prędkość. Kąt αk jest kątem, po przebyciu którego prędkość zmniejszyła się samoczynnie do wartości najmniejszej. Oszacowano, że w przypadku toru jazdy w postaci łuku o promieniu 3 m i 4 m, α1 wyniósł między 5 a 10 stopni, zaś αk – między 70 a 80 stopni. Wielkości te są szacunkowe i mogą być obarczone pewną niepewnością, ponieważ nie było możliwości dokładnego pomiaru tych kątów. W przypadku toru jazdy zbliżonego do toru o promieniu R=5 m kątów tych nie szacowano. W tablicy 3.1 zawarto zarejestrowane wartości prędkości V0 i Vk podczas jazdy po łuku o promieniu R wynoszącym 3 m, 4 m i 5 m.
Tablica 3.1. Wartości prędkości początkowych Vo i końcowych Vk wózka Trajgo 24 z systemem SAS podczas pokonywania zakrętu
| R=3 m | R=4 m | R = 5 m | |||
| Vo [km/h] | Vk [km/h] | Vo [km/h] | Vk [km/h] | Vo [km/h] | Vk [km/h] |
| 11,25 | 5,7 | 11,3 | 5,8 | 11,5 | 7,35 |
| 11,25 | 5,7 | 11,4 | 5,9 | 11,4 | 6,8 |
| 11,25 | 5,5 | 11,15 | 5,9 | 11,15 | 6,8 |
| 10,0 | 5,0 | 10 | 5,1 | 9,65 | 5,75 |
| 9,95 | 4,9 | 10,05 | 5,1 | 9,7 | 6,25 |
| 10,0 | 4,9 | 10,0 | 5,1 | ||
| 7,5 | 3,5 | 7,35 | 4,15 | 7,5 | 4,65 |
| 7,55 | 3,55 | 7,50 | 3,55 | 7,5 | 4,65 |
| 7,55 | 3,55 | 7,50 | 4,2 | 7,5 | 4,75 |
| 5,55 | 2,65 | ||||
| 5,55 | 2,6 | ||||
| 5,55 | 2,6 | ||||
W polach o barwie szarej nie zarejestrowano danych. Jak widać , w przypadku torów w postaci łuku o promieniu około 3 m nastąpiło zmniejszenie prędkości o około 50 %. W przypadku toru w postaci łuku o promieniu około 5 m zmniejszenie prędkości jest mniejsze, a wynika to z zasady działania systemu.
Wyniki wskazują, że system SAS w wózku Trajgo 24 zmniejsza samoczynnie prędkość podczas pokonywania zakrętu po łuku, co zdecydowanie ułatwia zachowanie bezpieczeństwa podczas przejazdu takim torem.
3.6 Rozwiązanie zapobiegające uruchomieniu wózka przez osoby nieupoważnione
Wózek powinien mieć rozwiązanie (np. przyrząd z kluczem, system z kodem lub z kartą magnetyczną) zapobiegające jego uruchomieniu przez osobę nieupoważnioną.
3.7 Ogranicznik prędkości wózka
Zaleca się, aby wózki miały ogranicznik prędkości maksymalnej, np. programowalny przez upoważnione osoby. Do układu programowania mają dostęp tylko osoby upoważnione. Jeśli wózek nie ma ogranicznika prędkości maksymalnej, to zaleca się, aby była możliwość zainstalowania takiego ogranicznika lub zastosowania określonego ograniczenia prędkości maksymalnej na życzenie nabywcy.
3.8 Systemy ograniczające samoczynnie prędkość jazdy w przypadku podniesionego ładunku lub podnoszenia ładunku
Zaleca się, aby wózki były wyposażone w systemy ograniczające samoczynnie prędkość jazdy w przypadku ładunku podniesionego powyżej wysokości zapewniającej bezpieczeństwo.
Zaleca się, aby wózki były wyposażone w system samoczynnego ograniczania prędkości w przypadku podnoszenia ładunku lub zmiany położenia masztu podczas jazdy wózka.
3.9 Hamulec pomocniczy
Zaleca się, aby w przypadku wózka z hamulcem pomocniczym nie działającym samoczynnie, w widocznym miejscu było przypomnienie dla kierowcy, aby w przypadku opuszczania kokpitu zaciągnął on hamulec pomocniczy.
Wózki wyposażone w samoczynnie działający hamulec pomocniczy (przykład wózka z takim hamulcem - patrz rys. 3.7), w przypadku powstania nieprawidłowości w działaniu hamulca pomocniczego, w kokpicie powinna pojawić się wyraźna i czytelna informacja ostrzegająca o tym kierowcę wózka.
Rys. 3.7. Wózek z hamulcem pomocniczym działającym samoczynnie (przednie koła uniesione na klockach – wózek jest zahamowany)
3.10 Normy techniczne dotyczące bezpieczeństwa wózków
Zaleca się stosowanie podnośnikowych wózków jezdniowych czołowych spełniających wymagania dotyczące bezpieczeństwa według znowelizowanych norm dotyczących bezpieczeństwa PN-EN ISO 3691-1:2012E [27] oraz PN-EN 16307-1:2013E [28].
[6] Keytroller LLC, W. Martin Luther King Blvd.Tampa, FL 33614, USA. www.keytroller.com.
[7] Wszystkie informacje na temat przyrządów prędkości i rysunki są zamieszczone za zgodą firmy KYEYTROLLER LLC. W. Martin Luther King Blvd.Tampa, FL 33614, USA. www.keytroller.com



|
Klauzula RODO Dostępność cyfrowa Copyright © Centralny Instytut Ochrony Pracy - Państwowy Instytut Badawczy Wszelkie prawa do udostępnianych materiałów informacyjnych są zastrzeżone. Kopiowanie w celu rozpowszechniania fragmentów lub całości materiałów jest zabronione. Udostępnione materiały można kopiować zarówno we fragmentach jak i w całości wyłącznie na użytek własny. |